project 1: lineaire positionering met een DC-motor met encoder
2. Instellen sturing
De sturing bestaat uit twee delen:
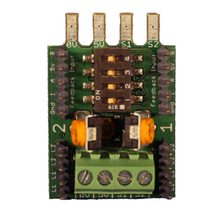
- de Kangaroo x2 van dimensionengineering (linkse foto)
Kort gezegd is dit een stuursysteem dat de inkomende spanning van de draaiweerstand inleest en op basis van de waarde (0V tot 5V) het platform positioneert.
Hierbij komt 0V overeen met de positie van het schuifplatform het dichtste bij de motor.
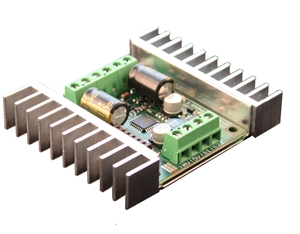
5V komt overeen met de positie van het schuifplatform het verst verwijderd van de motor. - de Sabertooth 2x12 motorcontroller (rechtse foto)
Een motorcontroller is een elektronisch systeem dat de energiestroom naar de motor regelt. Hierbij wordt de snelheid en de draaizin gecontroleerd. De motorcontroller Sabertooth 2x12 krijgt instructies van het stuursysteem Kangaroo x2. De Sabertooth 2x12 kan twee motoren aandrijven. In dit project gebruiken we alleen de aansluiting voor de eerste motor.
|
|
Opdat we de sturing kunnen gebruiken binnen het project moeten we eerst volgende stappen doorlopen:
- De kleine schakelaars op de Kangaroo x2 correct instellen.
- De kleine schakelaars op de Sabertooth 2x12 correct instellen.
- De Kangaroo x2 zichzelf laten tunen. Dit betekent dat de Kangaroo x2 zelf de grenzen van de as leert via de microschakelaars.
- Testen van het systeem via de draaiweerstand.
- Instellen van de motorsnelheid
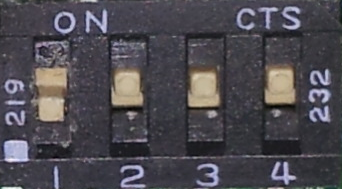
Stap 1: instellen van de kleine schakelaars op de Kangaroo x2
Stel de kleine schakelaars in zoals getoond op onderstaande foto. Schakelaars 2, 3 en 4 moeten op ON staan = naar boven staan. Schakelaar 1 moet op OFF staan = naar onder staan.
Stel de kleine schakelaars in zoals getoond op onderstaande foto. Schakelaars 2, 3 en 4 moeten op ON staan = naar boven staan. Schakelaar 1 moet op OFF staan = naar onder staan.
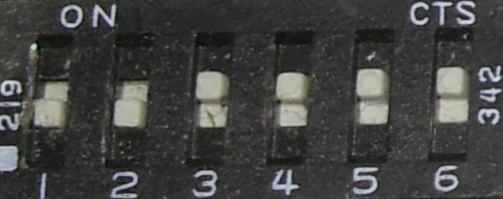
Stap 2: instellen van de kleine schakelaars op de Sabertooth 2x12
Stel de kleine schakelaars in zoals getoond op onderstaande foto. Schakelaars 2, 3,4,5 en 6 moeten op ON staan = naar boven staan. Schakelaar 1 en 2 moeten op OFF staan = naar onder staan.
Stel de kleine schakelaars in zoals getoond op onderstaande foto. Schakelaars 2, 3,4,5 en 6 moeten op ON staan = naar boven staan. Schakelaar 1 en 2 moeten op OFF staan = naar onder staan.
Stap 3: de Kangaroo x2 zichzelf laten tunen
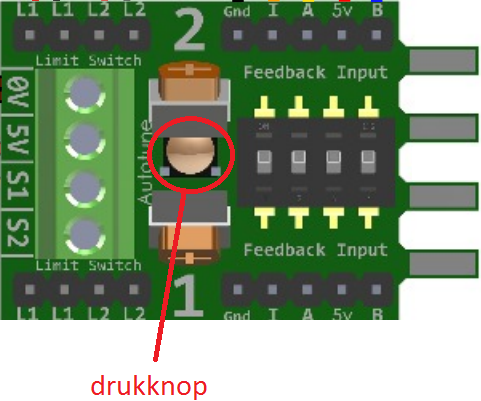
Met tunen bedoelen we dat de Kangaroo x2 zelf de grenzen van de as leert via de microschakelaars. Concreet zal de Kangaroo x2 de motor zo aansturen dat het platform tegen de microschakelaars oploopt. Om dit te verwezenlijken steken we de voeding in en gebruiken we de kleine drukknop die aangeduid is in onderstaande foto. Let op, het platform moet hiervoor bij start ongeveer in de het midden staan van de opstelling.
Met tunen bedoelen we dat de Kangaroo x2 zelf de grenzen van de as leert via de microschakelaars. Concreet zal de Kangaroo x2 de motor zo aansturen dat het platform tegen de microschakelaars oploopt. Om dit te verwezenlijken steken we de voeding in en gebruiken we de kleine drukknop die aangeduid is in onderstaande foto. Let op, het platform moet hiervoor bij start ongeveer in de het midden staan van de opstelling.
|
Om het tunen te starten gaan we als volgt te werk:
|
Stap 4: testen van het systeem via de potentiometer.
|
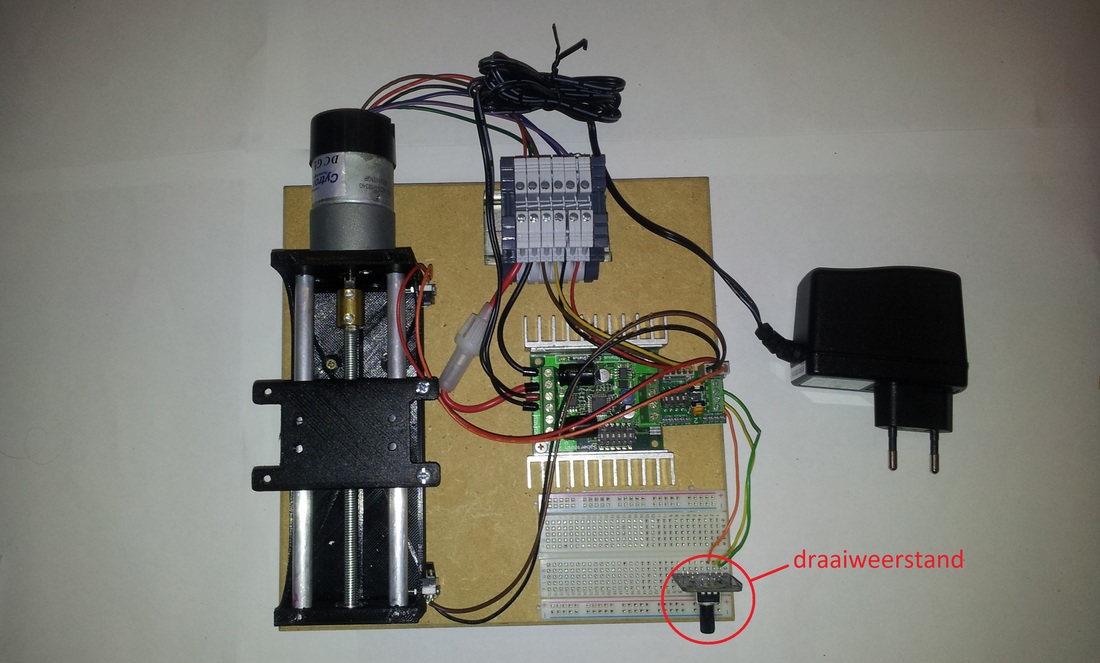
Via de draaiweerstand kunnen we het platform laten bewegen. Hierbij geldt het volgende:
Als de motor wat trilt op bepaalde posities dan komt dat omdat de motor niet perfect gepositioneerd raakt. Hij springt dan telkens een beetje over zijn positie. Meestal stopt dit vanzelf of doordat de positie verandert door middel van de draaiweerstand. |
|
|
Stap 5: instellen van de motorsnelheid
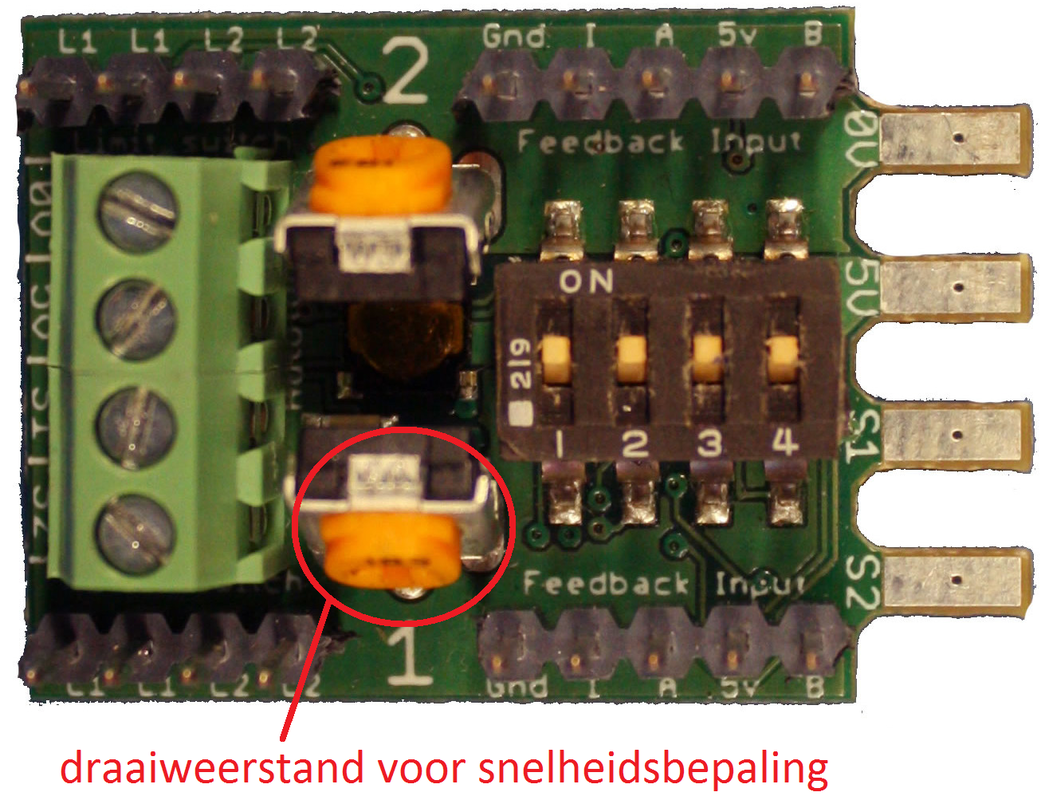
Via de aangeduide draaiweerstand op de Kangaroo x2 (zie ook de rechtse foto) kunnen we de snelheid van de motor bepalen. Standaard staat deze in het midden wat neerkomt op een snelheid van ongeveer 93 tr/min voor onze motor. Door de draaiweerstand met een kleine schroevendraaier naar rechts te draaien kan je de draaisnelheid verhogen, voor onze motor tot maximaal 185 tr/min. Draai je de draaiweerstand naar links dan zal de motor trager gaan draaien. Helemaal naar links draaien komt dan overeen met 0 tr/min Ter info, de andere draaiweerstand zou gebruikt worden om de snelheid te bepalen van een tweede motor maar deze is nu uiteraard niet aangesloten. |
|
Wie meer informatie wenst over de kangaroo x2 kan de site van Dimension Engineering bezoeken.
